착용자 걸음 분석해 보행패턴 찾아 장시간 사용 가능
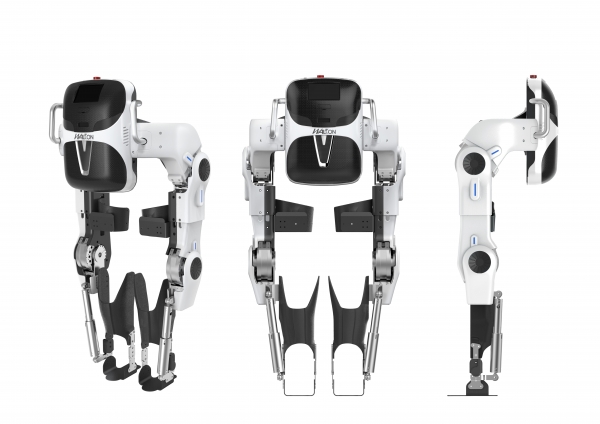
KAIST(총장 신성철) 기계공학과 공경철 교수 연구팀이 연세대학교 의과대학 세브란스병원 나동욱 교수와 공동 개발한 하반신 마비 장애인의 보행 보조를 위한 웨어러블 로봇 '워크온슈트 4'를 15일 공개했다.
워크온슈트4는 두 다리를 감싸는 외골격형 로봇으로 모터를 이용한 힘으로 하반신을 전혀 사용하지 못하는 장애인들의 움직임을 보조할 수 있다.
일어나 걷는 등의 기본적인 동작은 물론 계단·오르막 내리막·옆경사·문 열기·험지 등 일상생활에서 자주 접하게 되는 장애물을 극복할 수 있도록 제작됐다.
앞서 개발된 하반신 마비 장애인을 위한 웨어러블 로봇은 장시간 사용하기 어렵다는 한계가 있었다. 하반신 기능을 소실해 근육 등 신체 기능이 퇴화한 장애인들이 로봇을 착용하고 움직이기 위해 수십 kg에 이르는 무게를 감당해야 했기 때문이다.
연구팀은 이러한 문제를 해결하기 위해 인체가 이루는 자연스러운 균형을 모사해 로봇의 무게중심을 설계하는 기술을 고안했다.
사용자 신체 각 부위에 정밀하게 밀착되는 착용부를 만든 뒤 로봇 관절의 기준 위치를 조절해 무게중심을 정밀하게 맞췄다. 착용자의 긴장 정도나 지면의 상태와 같은 외부 요인을 지능적으로 관측하고 제어하는 기술을 더했다.
워크온슈트 4는 로봇이 착용자의 걸음을 30보 이내로 분석해 가장 적합한 보행패턴을 찾아 맞춤형으로 제공한다.
이를 통해 하반신 마비 장애인들이 웨어러블 로봇을 착용하고 장시간 걷거나 설 수 있도록 월등하게 기능을 끌어올렸고 연속보행 시 1분당 40m 이상을 걸을 수 있게 된 성과를 거뒀다.
연구팀은 활발한 기술협력을 통해 일부 부품을 제외한 대부분의 구성 요소를 국산 기술로 완성했다. 로봇의 구조설계와 시스템 소프트웨어는 공경철·나동욱 교수가 공동 창업한 ㈜엔젤로보틱스에서 주도했다.

공학적 설계와 제어는 공경철 교수가, 보행 보조기로서의 구조와 대상자를 위한 필수 기능 등을 점검하는 생체역학 분야는 나동욱 교수가 분담해 맡았다.
개인맞춤형 탄소섬유 착용부는 재활공학연구소에서 연구를 진행했으며 로봇의 동작 생성과 디자인은 영남대학교 로봇기계공학과와 ㈜에스톡스가 각각 담당했다.
워크온슈트4는 웨어러블 로봇을 입고 겨루는 사이배슬론 2020에 출전한다. 김병욱씨(46)와 이주현씨(19·여)가 워크온슈트4를 입고 출전한다. 이 대회는 올해 개최될 예정이다.
공경철 교수는 "지난 대회 이후 4년 동안 모든 연구원과 협력 기관들이 하나 돼 수준 높은 기술을 개발할 수 있었고 선수들과도 큰 어려움 없이 훈련했다ˮ며, "이번 대회는 워크온슈트 4의 기술적 우월성을 전 세계에 증명하는 중요한 무대가 될 것ˮ이라고 말했다.
